
Deep generative models
Advanced Statistical Inference
Generative models
Given training data from an unknown distribution \(p_\text{data}({\textcolor{input}{\boldsymbol{x}}})\), we want to learn a model \(p_\text{model}({\textcolor{input}{\boldsymbol{x}}})\) that approximates the true distribution.
Train from \({\textcolor{input}{\boldsymbol{x}}}\sim p_\text{data}({\textcolor{input}{\boldsymbol{x}}})\).
Generate from \({\textcolor{input}{\boldsymbol{x}}}\sim p_\text{model}({\textcolor{input}{\boldsymbol{x}}})\).
Latent variable models
Our objective is to learn the data distribution \(p({\textcolor{input}{\boldsymbol{x}}})\), but we suppose that each data point \({\textcolor{input}{\boldsymbol{x}}}\) is associated with a latent variable \({\textcolor{latent}{\boldsymbol{z}}}\).
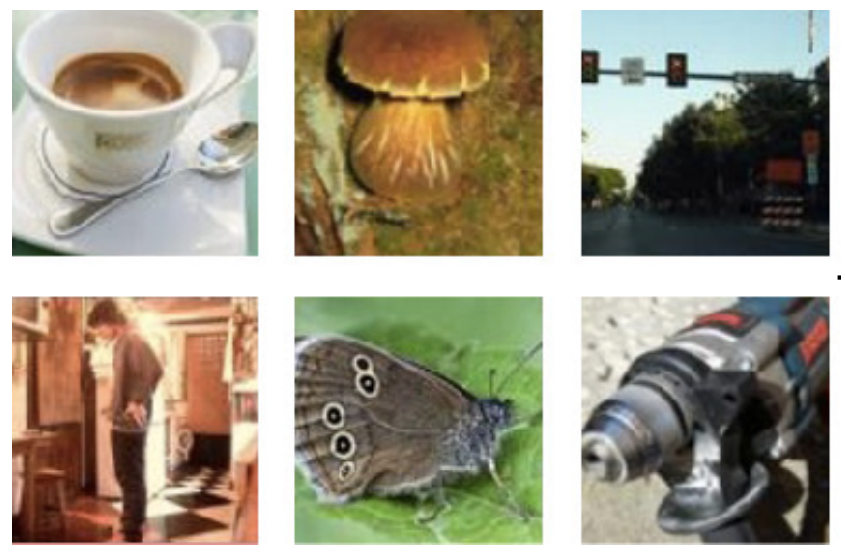
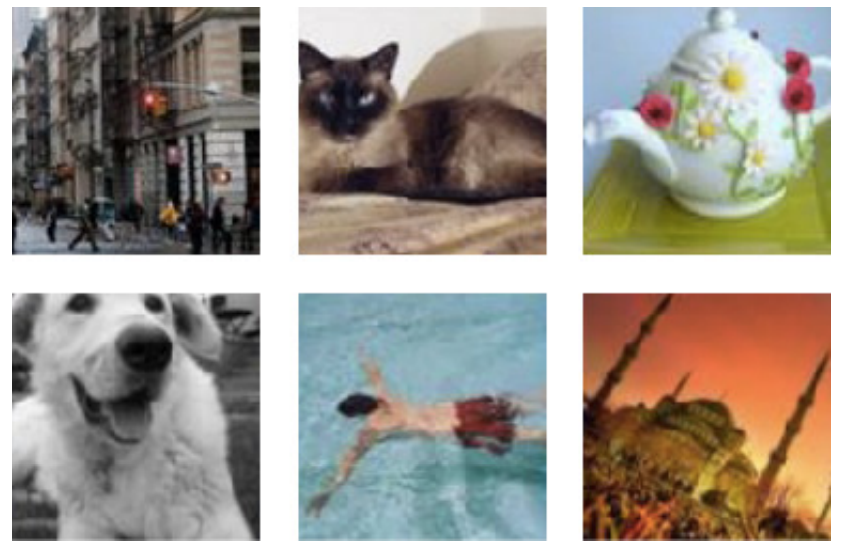
For example, image we want to learn the distribution of images of objects, like the one below:
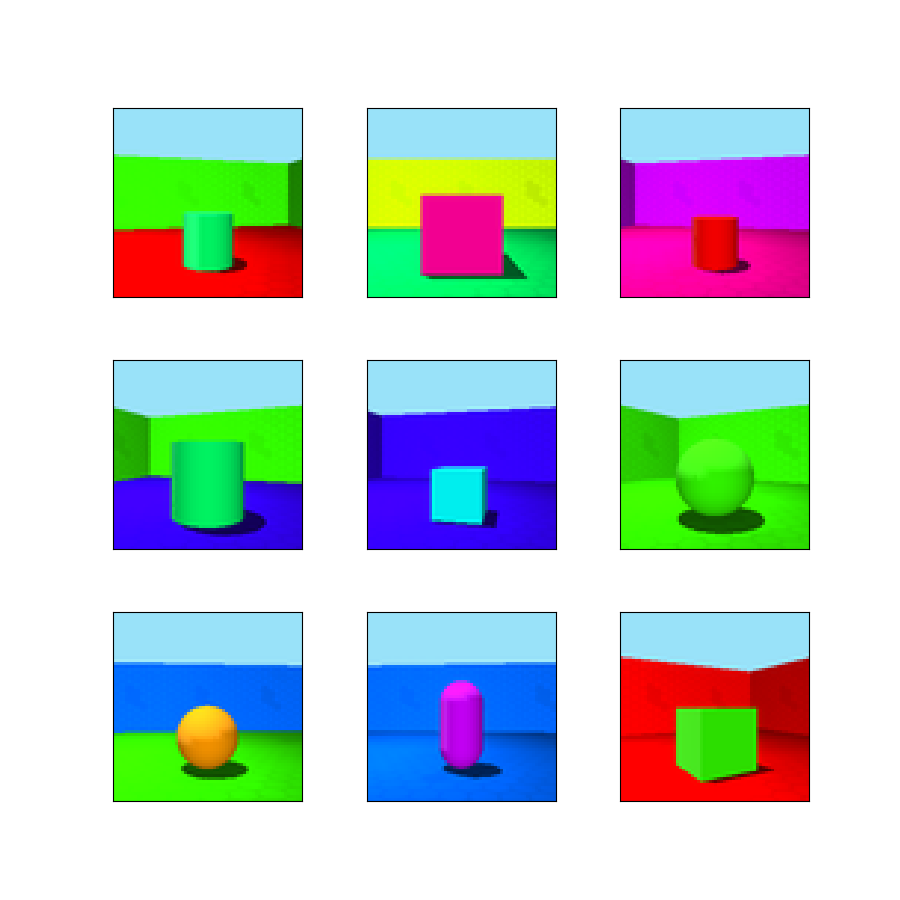
Each image is a huge vector of pixels \({\textcolor{input}{\boldsymbol{x}}}\in \mathbb{R}^{H \times W \times C}\), where \(H\) is the height, \(W\) is the width and \(C\) is the number of channels (in this case, \(64 \times 64 \times 3\)).
Each image can be described by a set of 6 latent variables: floor, wall and object color, shape, orientation and scale.
Variational autoencoders (VAEs)
Discaimer:
Variational autoencoders (VAEs) are often misrepresented as a simple autoencoder with a probabilistic twist.
This is wrong (sort of)! It hides the real nature of the encoder and decoder!

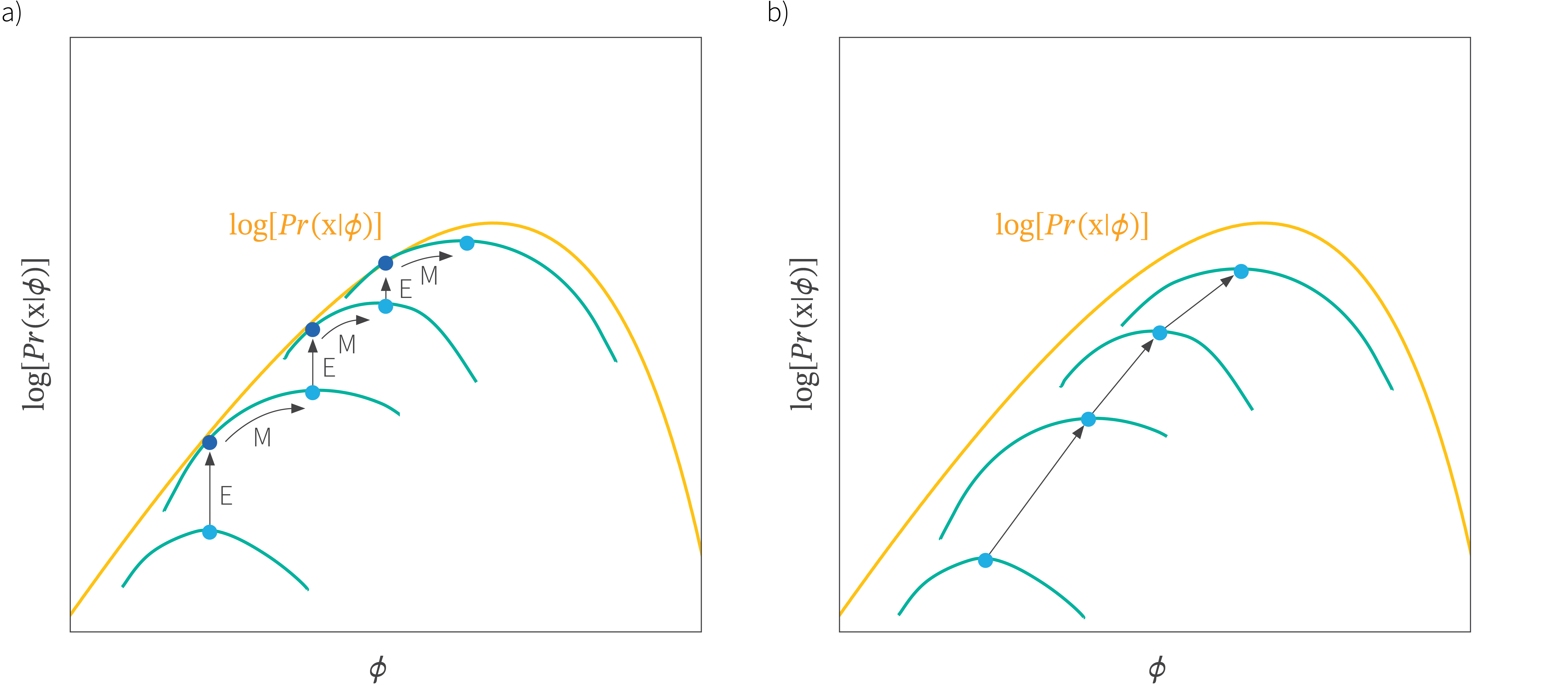
Joint optimization of \({\textcolor{params}{\boldsymbol{\theta}}}\) and \({\textcolor{vparams}{\boldsymbol{\nu}}}\)
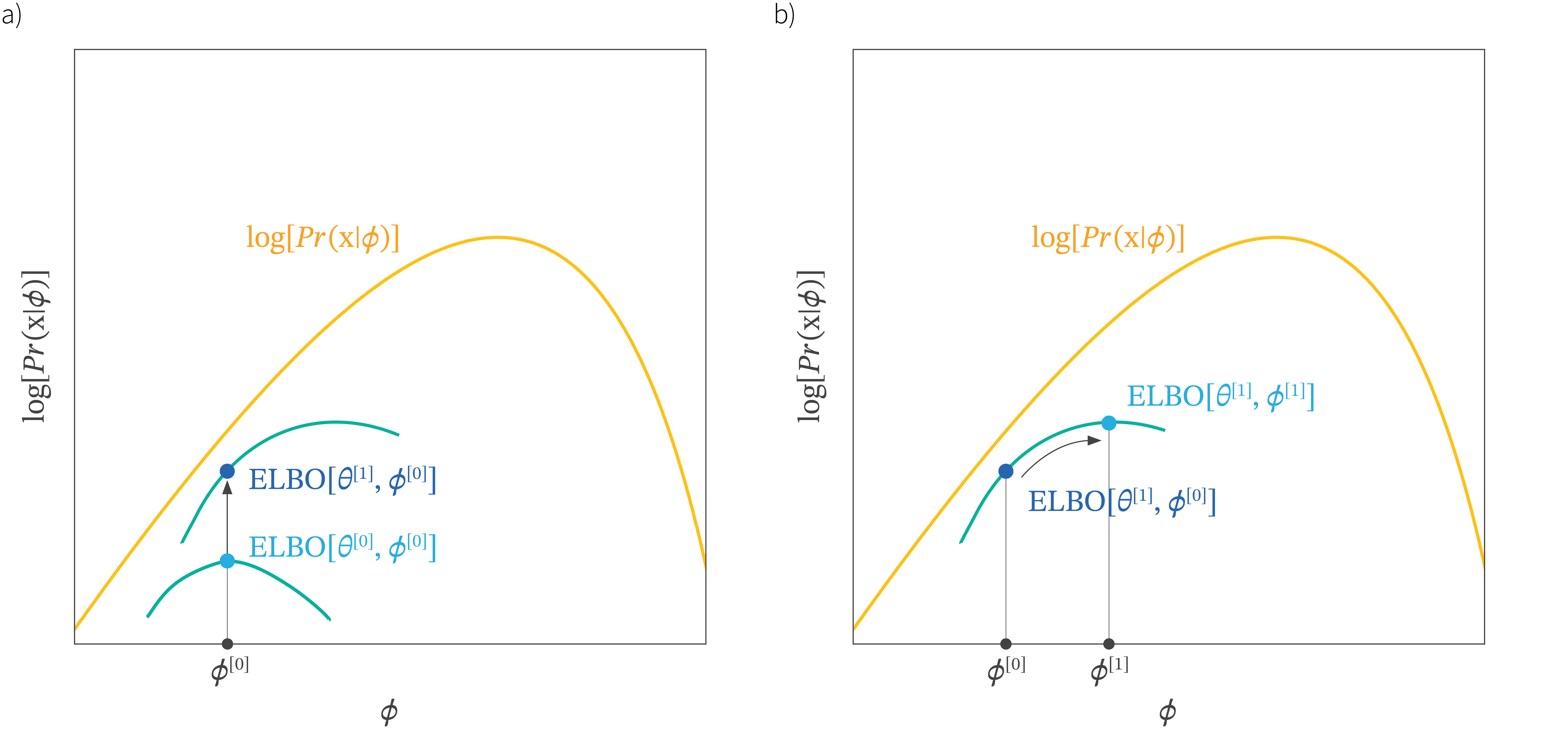
Expectation-Maximization vs Variational Inference
Amortization
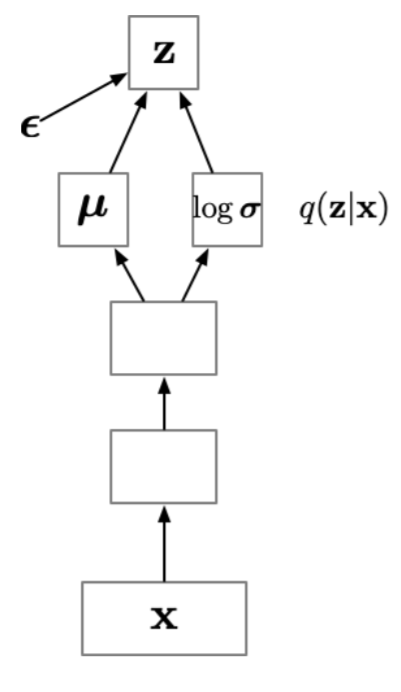
Idea: “amortize” the cost of computing the variational parameters \({\textcolor{vparams}{\boldsymbol{\nu}}}\) by learning a function that predicts \(\{ {\boldsymbol{\mu}}, {\boldsymbol{\sigma}}^2 \}\) as a function of the data \({\textcolor{input}{\boldsymbol{x}}}\).
The output of this function is generally \(\textcolor{vparams}{{\boldsymbol{\mu}}}\) and \(\log\textcolor{vparams}{{\boldsymbol{\sigma}}}\) (the \(\log\) is needed to ensure that the variance is positive).
The reparametrization trick is still used to sample from the variational distribution, the only difference is that the variational parameters are not free variables anymore, but are predicted by a neural network \({\boldsymbol{g}}({\textcolor{params}{\boldsymbol{\phi}}}, {\textcolor{input}{\boldsymbol{x}}})\).
Sometimes, this is noted as \(q({\textcolor{latent}{\boldsymbol{z}}}\mid {\textcolor{input}{\boldsymbol{x}}})\) to emphasize that the variational distribution depends on the data \({\textcolor{input}{\boldsymbol{x}}}\), even though it’s not actually a conditional distribution.
Putting it all together

Let’s train a VAE on MNIST (1 digit) with amortization

Generating samples from the VAE
Follow the generation process:
- Sample from the latent space \(z \sim p({\textcolor{latent}{\boldsymbol{z}}})\), where \(p({\textcolor{latent}{\boldsymbol{z}}})\) is the prior distribution.
- Decode the latent variable \(z\) to generate a sample \(x \sim p({\textcolor{input}{\boldsymbol{x}}}\mid {\textcolor{latent}{\boldsymbol{z}}})\) using the decoder network.

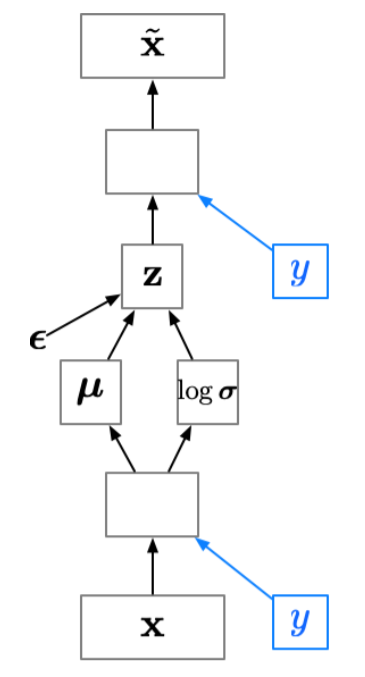
Conditional VAE (CVAE)
Sometimes we want to generate samples conditioned on some additional information \(p({\textcolor{input}{\boldsymbol{x}}}\mid {\textcolor{output}{\boldsymbol{y}}})\), e.g., we want to generate images of a specific class.
Since the latent code \({\textcolor{latent}{\boldsymbol{z}}}\) no longer has to model the image category, it can focus on modeling the stylistic features.
If we’re lucky, this lets us disentangle style and content. (Note: disentanglement is still a dark art.)
Conditional VAE can be achieve by adding an additional input to the encoder and decoder networks, which is the additional information \({\textcolor{output}{\boldsymbol{y}}}\):
Latent space analysis
You can often get interesting results by interpolating between two vectors in the latent space:

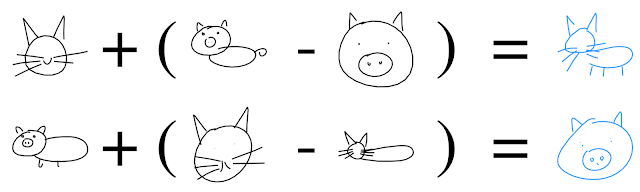
You can also perform “arithmetic” in the latent space, e.g. by adding or subtracting vectors:
Latent space visualization
By varying two latent dimensions (i.e. dimensions of \({\textcolor{latent}{\boldsymbol{z}}}\)) while holding \({\textcolor{output}{\boldsymbol{y}}}\) fixed, we can visualize the latent space.

Latent space interpolation
By varying the label \({\textcolor{output}{\boldsymbol{y}}}\) while holding \({\textcolor{latent}{\boldsymbol{z}}}\) fixed, we can solve image analogies.

Problems with VAEs
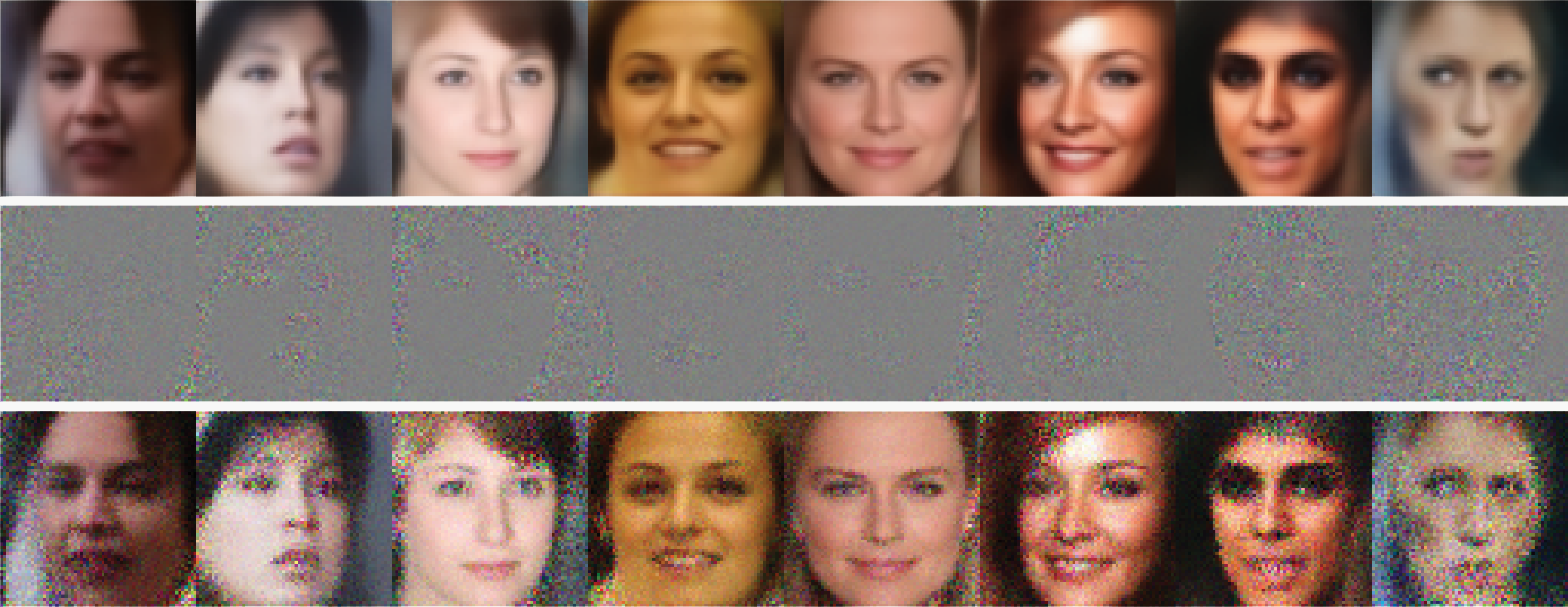
The samples may not be very good:
VAEs suffer from mode collapse, where the amortization network learns to predict the prior. This is due to the strong effect of the KL divergence term in the ELBO.
The spherical prior \(p({\textcolor{latent}{\boldsymbol{z}}})\) is too restrictive, it can lead to a “blurry” output distribution (or very noisy samples, if we sample from the likelihood).
Likelihood models
So far we have focused on likelihood-based generative models, where we maximize the likelihood of the data given the model parameters.
Likelihood-based models are powerful, but they have some limitations:
- We run on the assumption that higher likelihood means better generated samples, but this is not always true.
![]()
- We run on the assumption that higher likelihood means better generated samples, but this is not always true.
Likelihood-free learning consider alternative training objectives that do not depend directly on a likelihood
Comparing distributions via samples
\(S_1 = \{ {\textcolor{input}{\boldsymbol{x}}}_1, \ldots, {\textcolor{input}{\boldsymbol{x}}}_N \mid {\textcolor{input}{\boldsymbol{x}}}_i \sim p({\textcolor{input}{\boldsymbol{x}}}) \}\)
\(S_2 = \{ {\textcolor{input}{\boldsymbol{x}}}_1, \ldots, {\textcolor{input}{\boldsymbol{x}}}_N \mid {\textcolor{input}{\boldsymbol{x}}}_i \sim q({\textcolor{input}{\boldsymbol{x}}}) \}\)
Given a finite set of samples from two distributions (\(S_1\) and \(S_2\)), how can we tell if these samples are from the same distribution or not?
Generative models and two-sample tests
Assume \(p_\text{data}({\textcolor{input}{\boldsymbol{x}}})\) is the true data distribution and we have training samples \(S_1\)
Assume we have a model \(p({\textcolor{input}{\boldsymbol{x}}}; {\textcolor{params}{\boldsymbol{\theta}}})\) that permits us to generate samples for \(S_2\)
Idea: formulate the training of the generative model to minimize a two-sample test statistic between \(S_1\) and \(S_2\)
Two-sample tests are hard
Finding a good test objective in high dimensions is hard, especially when the data is complex (e.g., images).

In the generative model setup, we know that \(S_1\) and \(S_2\) come from different distributions, \(p_\text{data}({\textcolor{input}{\boldsymbol{x}}})\) and \(p({\textcolor{input}{\boldsymbol{x}}}; {\textcolor{params}{\boldsymbol{\theta}}})\)
Idea: Learn a statistic to automatically identify in what way the two sets of samples differ
How? Train a classifier (which we will call discriminator)
Discriminator
Build binary classifier \({\textcolor{output}{D}}({\textcolor{params}{\boldsymbol{\phi}}}, {\textcolor{input}{\boldsymbol{x}}})\) (e.g., neural network with parameters \({\textcolor{params}{\boldsymbol{\phi}}}\)) that tries to distinguish “real” (\(\textcolor{output}{y}= 1\)) samples from the dataset and “fake” (\(\textcolor{output}{y}= 0\)) samples generated from the model

Test statistic: negative loss of the classifier.
- Low loss means real and fake samples are easy to distinguish (distributions are different).
- High loss means real and fake samples are hard to distinguish (distributions are similar).
Goal: Maximize the two-sample test statistic or equivalently minimize the classification loss.
Generator
Still missing: how do we generate the “fake” samples \(S_2\) from the model \(p({\textcolor{input}{\boldsymbol{x}}}; {\textcolor{params}{\boldsymbol{\theta}}})\)?

Generator:
Latent variable model with a deterministic mapping from a latent variable \({\textcolor{latent}{\boldsymbol{z}}}\) to the data space \({\textcolor{input}{\boldsymbol{x}}}\):
- Define a function \({\textcolor{output}{G}}({\textcolor{params}{\boldsymbol{\theta}}}, {\textcolor{latent}{\boldsymbol{z}}})\) as a neural network with parameters \({\textcolor{params}{\boldsymbol{\theta}}}\)
- Sample \({\textcolor{latent}{\boldsymbol{z}}}\sim p({\textcolor{latent}{\boldsymbol{z}}})\), where \(p({\textcolor{latent}{\boldsymbol{z}}})\) is the prior distribution (e.g., Gaussian)
- Compute \({\textcolor{input}{\boldsymbol{x}}}= {\textcolor{output}{G}}({\textcolor{params}{\boldsymbol{\theta}}}, {\textcolor{latent}{\boldsymbol{z}}})\),
Generative adversarial networks (GANs)
This model configuration and training procedure is known as Generative Adversarial Networks (GANs)

Generative adversarial networks (GANs)
GANs have been successfully applied to several domains and tasks

Training GANs is hard (intuition)
Imagine \(f(x, y) = xy\) and we want to comput \(\min_x \max_y f(x, y)\). A gradient descent ascent algorithm would look like this:
\[ \begin{aligned} x &\gets x - \eta \nabla_x f(x, y) = x - \eta y\\ y &\gets y + \eta \nabla_y f(x, y) = y + \eta x \end{aligned} \]

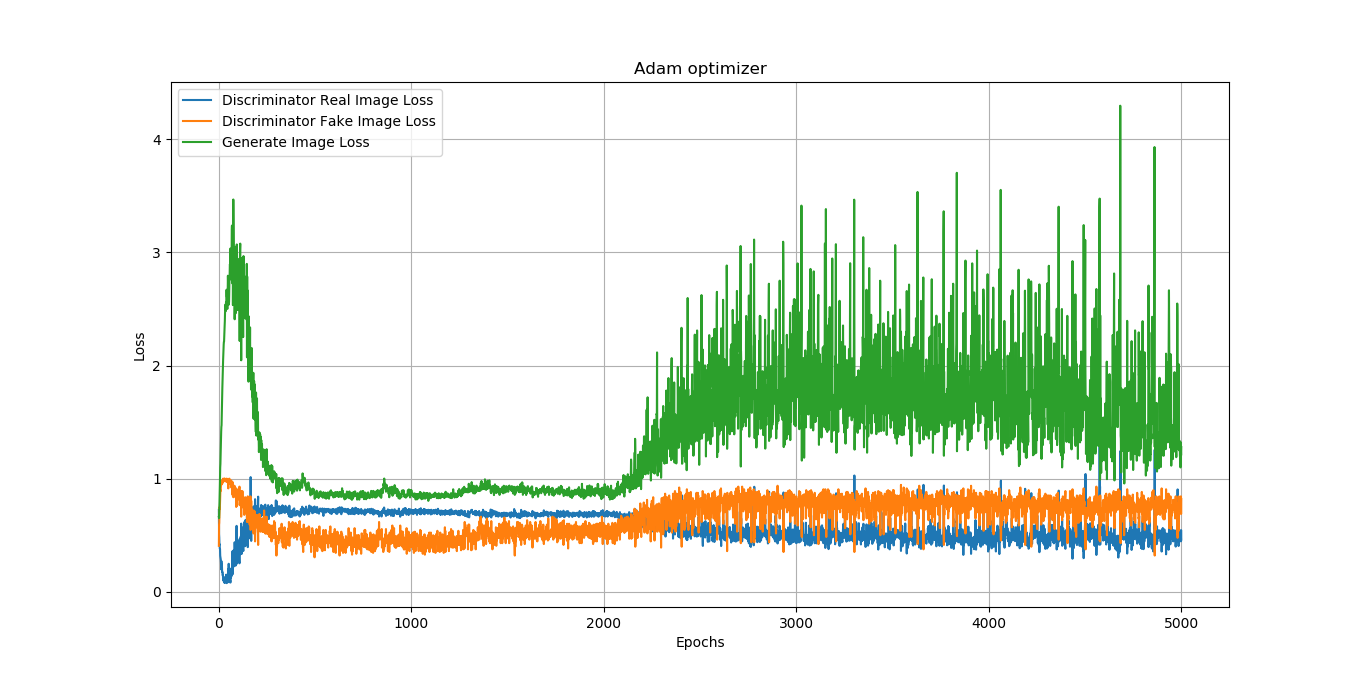
Training GANs is hard
The generator and discriminator loss keep oscillating during GAN training
Difficult to assess if training is converging or not
![]()
Diffusion models
Currently the state-of-the-art generative models, especially for image/video generation tasks

Diffusion models
Key idea: corrupt the data \({\textcolor{input}{\boldsymbol{x}}}\) into noise by adding Gaussian noise in a series of steps, and then learn to reverse this process to generate new samples.
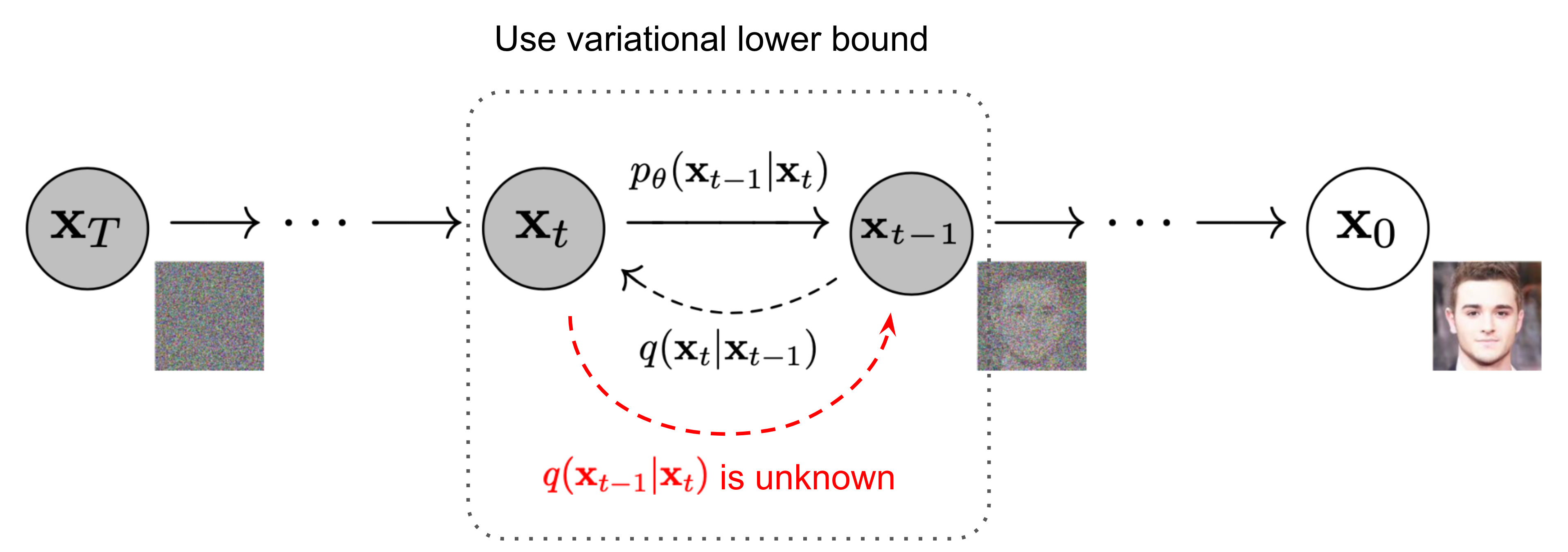
For example:
\[ q({\textcolor{input}{\boldsymbol{x}}}_t \mid {\textcolor{input}{\boldsymbol{x}}}_{t-1}) = {\mathcal{N}}({\textcolor{input}{\boldsymbol{x}}}_t; \sqrt{1 - \beta_t} {\textcolor{input}{\boldsymbol{x}}}_{t-1}, \beta_t {\boldsymbol{I}}) \]
where \(\beta_t\) is a small positive constant that controls the amount of noise added at each step.
Continuous diffusion process
The diffusion process can be viewed as a continuous-time stochastic process, described by a stochastic differential equation (SDE) of the form:
\[ \dd{\textcolor{input}{\boldsymbol{x}}}_t = {\textcolor{output}{\boldsymbol{f}}}({\textcolor{input}{\boldsymbol{x}}}_t, t) \dd t + \textcolor{output}{g}(t) \dd {\boldsymbol{B}}_t \]
Reverse diffusion process
The reverse diffusion process is also described by an SDE:
\[ \dd{\textcolor{input}{\boldsymbol{x}}}_t = \left({\textcolor{output}{\boldsymbol{f}}}({\textcolor{input}{\boldsymbol{x}}}_t, t) - \textcolor{output}{g}(t)^2 \nabla_{{\textcolor{input}{\boldsymbol{x}}}_t} \log p({\textcolor{input}{\boldsymbol{x}}}_t)\right) \dd t + \textcolor{output}{g}(t) \dd {\boldsymbol{B}}_t \]
Training diffusion models
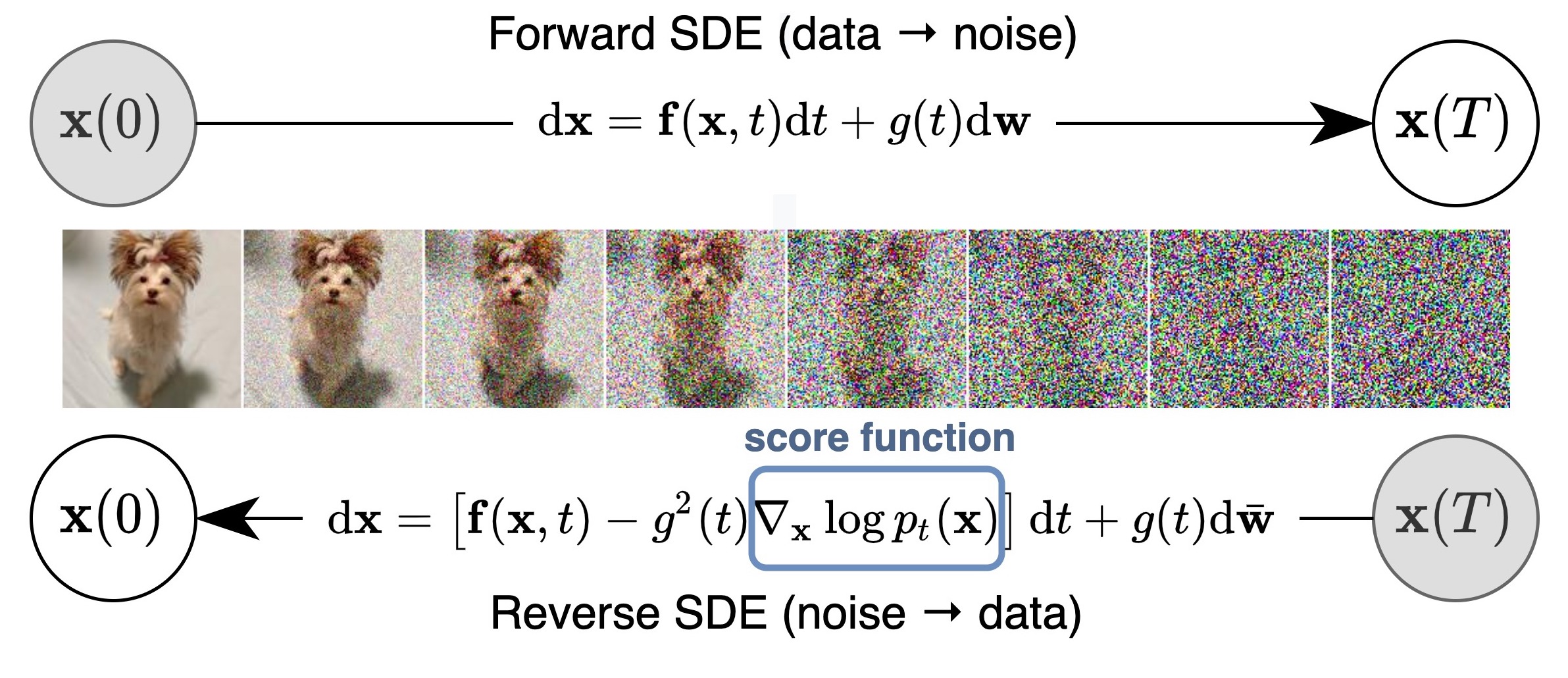
To train the diffusion model, we learn a neural network \({\textcolor{output}{\boldsymbol{s}}}({\textcolor{params}{\boldsymbol{\theta}}}, \cdots)\) to approximate the score function \(\nabla_{{\textcolor{input}{\boldsymbol{x}}}_t} \log p({\textcolor{input}{\boldsymbol{x}}}_t)\):
\[ \text{KL}\left(p_0({\textcolor{input}{\boldsymbol{x}}}) \parallel p({\textcolor{input}{\boldsymbol{x}}}; {\textcolor{params}{\boldsymbol{\theta}}})\right) \leq \frac{T}{2}\mathbb{E}_{t \in \mathcal{U}(0, T)}\mathbb{E}_{p_t({\textcolor{input}{\boldsymbol{x}}})}[\lambda(t) \| \nabla_{\textcolor{input}{\boldsymbol{x}}}\log p_t({\textcolor{input}{\boldsymbol{x}}}) - {\textcolor{output}{\boldsymbol{s}}}({\textcolor{params}{\boldsymbol{\theta}}}, {\textcolor{input}{\boldsymbol{x}}}, t) \|_2^2] + \text{KL}\left(p_T({\textcolor{input}{\boldsymbol{x}}}) \parallel p_{\text{prior}}({\textcolor{input}{\boldsymbol{x}}})\right) \]
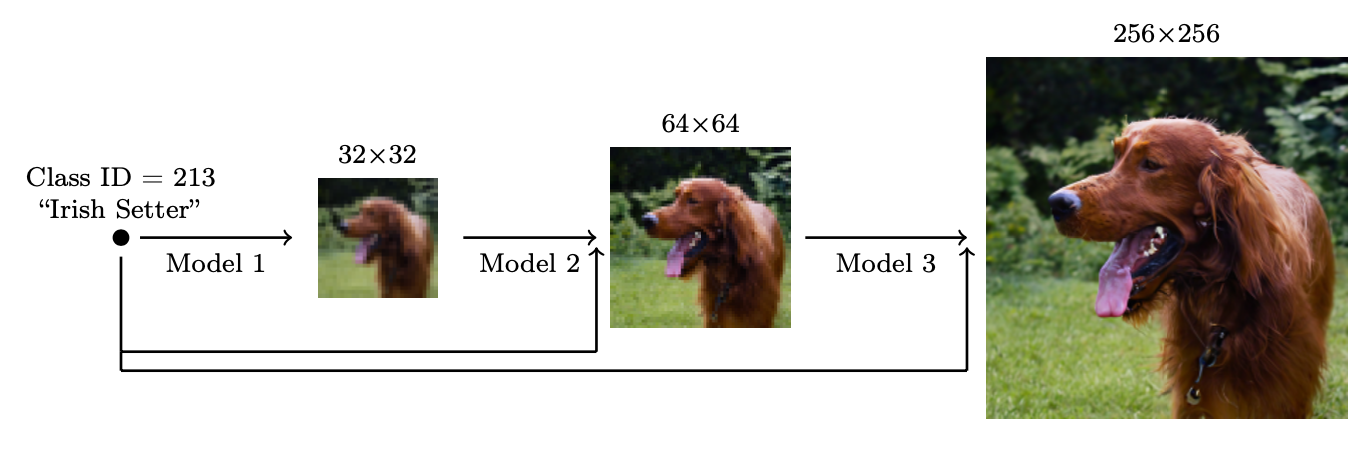
Flexibility of diffusion models: super-resolution
High-resolution samples starting from low-resolution noise:
Flexibility of diffusion models: inpainting

Flexibility of diffusion models: colorization
Flexibility of diffusion models: text-to-image


Prompt: Produce a stunning, award-winning close-up of a chameleon blending into a background of vibrant, textured leaves, its eye swivelled to look directly at the camera. The intricate texture of its skin changing colour is the focus (visceral adaptation). Abstract dappled light filters through the leaves. Inspired by wildlife macro photography and camouflage patterns.

Prompt: Cinematic shot using a stabilized drone flying dynamically alongside a pod of immense baleen whales as they breach spectacularly in deep offshore waters. The camera maintains a close, dramatic perspective as these colossal creatures launch themselves skyward from the dark blue ocean, creating enormous splashes and showering cascades of water droplets that catch the sunlight. In the background, misty, fjord-like coastlines with dense coniferous forests provide context. The focus expertly tracks the whales, capturing their surprising agility, immense power, and inherent grace. The color palette features the deep blues and greens of the ocean, the brilliant white spray, the dark grey skin of the whales, and the muted tones of the distant wild coastline, conveying the thrilling magnificence of marine megafauna.
![]()